Modelo: DLRB-1410B
Resumen
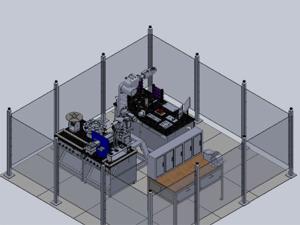
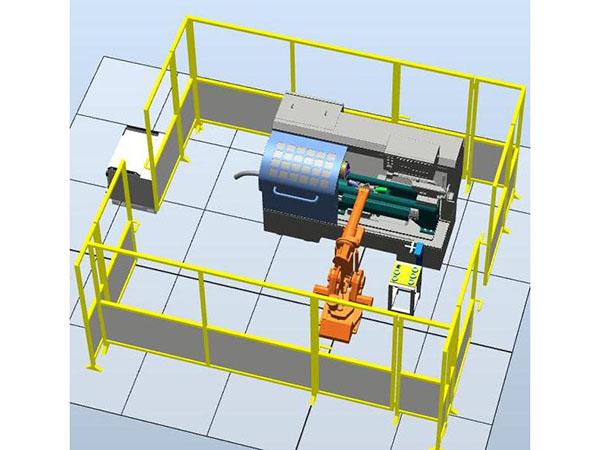
El sistema de capacitación de carga y descarga con robot industrial toma la pieza de trabajo que se está procesando y la coloca en la máquina. Luego del procesamiento, el robot llevará la pieza de trabajo al sistema visual para la inspección. Aquí las piezas de trabajo se califican para la transferencia a los próximos pasos.
Parámetros técnicos del sistema de capacitación de carga y descarga con robot industrial
Número de modelo: DLRB-1410B (otras marcas disponibles)
Sobrepeso de muñeca: 5 kg
Ejes: 6 eje
Radio máximo de envergadura: 1.44m
Grado de protección: IP54
Modo de instalación: Instalación a tierra
Repetición posicional: 0.05 mm
Suministro de energía: Trifásico 400V(+10%,-15%),50Hz/60Hz
Energía nominal: 4.5KVA
Contenido de capacitación
1. Principios básicos y constitución de robots industriales
2. Conocimiento de ontología de robots industriales
3. Conocimiento de piezas eléctricas de robots industriales
4. Conocimiento de controlador de robots industriales
5. Aprendizaje y capacitación del control de movimientos de articulaciones de robot de 6 ejes
6. Aprendizaje y capacitación del control de trayectoria de movimiento lineal del robot industrial de 6 ejes
7. Aprendizaje y capacitación de la trayectoria de movimiento circular del robot industrial de 6 ejes
8. Aprendizaje y capacitación del control de límites de aceleración y desaceleración del robot industrial de 6 ejes
9. Capacitación de operación básica con control de robot
10. Capacitación de operación de aplicación de sistema de coordinación de robot (coordinación de herramientas, coordinación de usuarios)
11. Capacitación de programación de operación y enseñanza para robot
12. Aplicación típica de robot - Aplicación de carga y descarga de herramienta mecánica
13. Principio de herramienta mecánica, aprendizaje de estructura
14. Clasificación y función de la herramienta mecánica CNC
15. Aprendizaje de sistema de control numérico
16. Tecnología de aplicación de herramienta mecánica CNC
17. Programación y operación de herramienta mecánica CNC