Modelo: DLRB-934
Resumen de sistema de capacitación de estación de trabajo típica con robot industrial
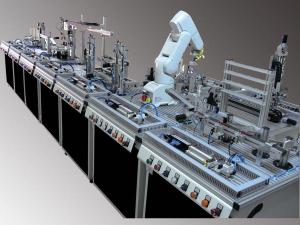
Un equipo de estación de trabajo típica con robot industrial consiste de un robot industrial de seis ejes, plataforma de capacitación, modelo de tareas de ensamblaje, modelo de tareas de pegado, modelo de paletización de llantas, modelo de organización de pruebas, tanque de almacenamiento de materiales, accesorios de succión doble, abrazaderas de pistolas de pegamento, accesorios paralelos, accesorios de mandíbula, consola, equipos de consumo y mesas de ensamblaje. Los robots industriales y el ensamblaje se pueden combinar con modelos de tareas, modelos de tareas de pegado, modelos de paletización de llanta y modelos de organización de pruebas para lograr las tareas respectivas acordemente.
Parámetros del sistema de capacitación de estación de trabajo típica con robot industrial
Energía de entrada: Monofásico de tres cables AC220V ± 10% 50HZ,
Ambiente operativo: Temperatura -10 ℃ - + 40 ℃, humedad relativa <85% (25 ℃), no condensation Altitude ><4000m
Control de energía: Suministro de energía de encendido y apagado de aire automático, protección contra exceso de voltaje, protección contra bajo voltaje, protección contra exceso de corriente, sistema de protección de fugas.
Energía de salida:
(1) Monofásico AC 220V ± 10% 50HZ salida de control con interruptor de arranque y protección de fusibles.
(2) Suministro de energía estabilizado DC: 24V / 1A,
Dimensiones: 1300mm × 750mm × 1700mm
Contenido de capacitación
1. Cableado de instalación de controlador y cuerpo de robot industrial
2. Recuperación de parámetros de inicialización y robots industriales
3. Comunicación PLC IO y robots industriales
4. Cableado IO de robots industriales
5. Cableado e instalación de aplicación de paletización de robots industriales
6. Diseño y selección de accesorios de paletización de robot industriales
7. Programación y depuración de aplicación de paletización de robots industriales
8. Cableado e instalación de aplicación de pegamento de robots industriales
9. Aplicación de selección y diseño de accesorio de pegado de robots industriales
10. Depuración y programación de aplicación de pegamento de robots industriales
11. Aplicaciones de ensamblaje de cableado e instalación de robot industrial
12. Aplicaciones de diseño y selección de accesorios de ensamblaje de robots industriales
13. Aplicaciones de ensamblaje de depuración y programación de robot industrial
14. Organización de cableado e instalación de aplicación de detección de robots industriales
15. Organizado para detectar la aplicación de diseño y selección de accesorio de robot industrial
16. Depuración y programación de aplicación de organización de detección de robot industrial
17. Clasificación de robots industriales y aplicación de materiales de diseño seleccionados
18. Clasificación de diseño y aplicación de almacenamiento de robots industriales
19. Aplicación y diseño integral de robots industriales y periféricos.