Modelo: DLFA-5DPR-A
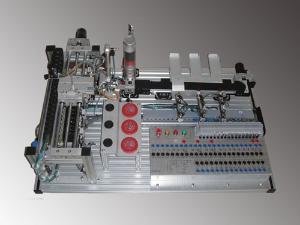
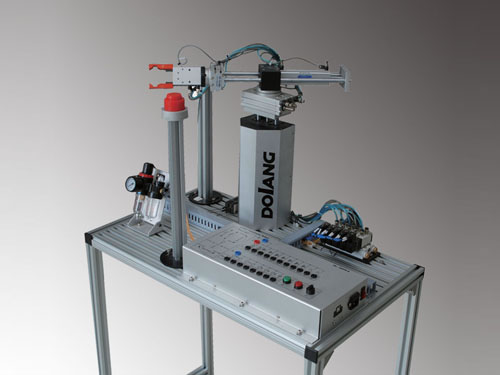
El entrenador de manipulación neumática de cinco ejes DLFA-5DPR-A puede proveer una simulación real de la condición de trabajo del robot de neumática industrial y puede completar los procedimientos de agarre y transferencia del robot en líneas de ensamblaje industrial.
Este dispositivo de entrenamiento está hecho de la porción de funcionamiento, porción de control y la interfase de PC. La porción de funcionamiento está equipada con múltiples sensores industriales. La porción de control adopta tres modos de control, control PLC, control SCM y control de computadora host, para completar el control de todo el sistema.
Parámetros técnicos principales del entrenador de manipulación neumática de cinco ejes
1. Voltaje de funcionamiento: fase simple, AC 220V
2. Temperatura ambiental: -10°C ~ 40°C
3. Humedad ambiental: ≤90% (25℃)
4. Capacidad: ≤1KVA
5. Dimensiones: 760mmx450mmx1366mm
Nombres relacionados
Equipo experimental de mecatrónica | Entrenador de brazo manipulador industrial | Dispositivo de entrenamiento robot